기어
Gear


기어는 회전하는 원형 기계 부품으로 톱니바퀴나 톱니바퀴의 경우 톱니( 톱니바퀴라고 함)를 삽입하고, 톱니바퀴는 다른(호환성) 톱니 부분과 맞물려서 토크와 속도를 전달(전환)한다.기어 작동의 기본 원리는 레버의 기본 원리와 유사하다.[1]기어는 비공식적으로 톱니바퀴라고도 할 수 있다.Geared 장치는 동력원의 속도, 토크 및 방향을 변경할 수 있다.크기가 서로 다른 기어는 기어비를 통해 토크의 변화를 일으켜 기계적 이점을 만들어 내므로 단순한 기계로 간주할 수 있다.두 메싱 기어의 회전 속도 및 토크는 직경에 비례하여 다르다.두 개의 메싱 기어의 톱니는 모두 같은 모양을 하고 있다.[2]
순차적으로 작동하는 두 개 이상의 메싱 기어를 기어 열차 또는 변속기라고 한다.변속기의 기어는 교차된 벨트 풀리 시스템의 휠과 유사하다.기어의 이점은 기어의 톱니가 미끄러짐을 방지한다는 것이다.자전거, 오토바이 및 자동차와 같이 복수의 기어비를 가진 변속기에서 "기어"(예: "1단 기어")라는 용어는 실제 물리적 기어비가 아닌 기어비를 가리킨다.이 용어는 기어비가 불연속적인 것이 아니라 연속적인 것이거나 연속적으로 가변적인 변속기와 같이 실제로 기어를 포함하지 않는 경우에도 유사한 장치를 설명한다.[3]
게다가, 기어는 회전 대신 번역을 만들어 내는 랙이라고 불리는 선형 톱니 부분과 맞물릴 수 있다.
역사
.jpg)
초기 기어의 예는 중국 허난 성 뤄양 박물관에 보존되어 있는 BC 4세기(잔궈 시대 - 후기 동주 왕조)부터[4] 비롯되었다.유럽에서 가장 초기에 보존된 기어는 앤티키테라 메커니즘에서 발견되었는데, 이것은 천문학적 위치를 계산하기 위해 고안된 매우 빠르고 복잡한 게이터 장치의 한 예다.그것의 건설 시기는 현재 기원전 150년에서 100년 사이에 추정되고 있다.[5]기어는 로마 이집트의 알렉산드리아의 영웅(Hero of Alexandria)과 연결된 작품에서 등장하지만 기원전 3세기 프톨레마이오스 이집트의 알렉산드리아 학파의 역학으로 거슬러 올라갈 수 있으며, 그리스 다산술 아르키메데스 (기원전 287–212년)에 의해 크게 발전되었다.[6][7]

주변부에 톱니바퀴가 있는 원형 기어/링의 섹터로 구성된 톱니바퀴에서 왕복 운동을 수신/전달하는 세그먼트 기어는 1206년 아랍의 엔지니어 알자지리에 의해 발명되었다.[8][9]이 웜 기어는 13-14세기 동안 롤러 면 진에 사용하기 위해 인도 아대륙에서 발명되었다.[10]차동 기어는 중국의 남부 지점 병거 일부에서 사용되었을 수 있지만,[11] 차동 기어의 첫 번째 검증 가능한 사용은 1720년 영국의 시계 제조업체인 조셉 윌리엄슨이 사용했다.
초기 기어 적용의 예는 다음과 같다.
- 1386 CE: 솔즈베리 대성당 시계: 그것은 여전히 작동하는 세계에서 가장 오래된 기계식 시계다.
- c. 13~14세기:웜 기어는 인도 아대륙의 롤러 면 진의 일부로 발명되었다.[10]
- C. 1221 CE 게이라드 아스트롤라베는 12궁도와 그 위상, 그리고 신월 이후 달의 위치를 보여주는 이스파한에 지어졌다.[12]
- c. 1206 CE:Al-Jazari는 물 들어올리기 장치의 일부로 세그먼트 기어를 발명했다.[9]
- 725 CE: 최초의 고정식 기계 시계는 중국에서 만들어졌다.
- c. 200–265 CE: 마준은 기어를 남쪽을 가리키는 전차의 일부로 사용했다.
- 기원전 2세기:안티키테라 메커니즘
- 자연에서: 플랜토퍼 곤충 Issus coleoptraus의 님프들의 뒷다리에서.
어원
기어라는 단어는 아마도 올드 노르드 ørvi (plural gørvar) 'apparel, gear'에서 유래한 것으로, øra, '만들기, 만들기, 만들기, 만들기; 순서 세우기, 준비하기'와 관련된 것으로, 올드 노르드에서 "책 쓰기부터 드레싱 고기까지 다양한 상황에서 사용된다."이러한 맥락에서, '기계의 톱니바퀴'의 의미는 처음에 1520년대에 증명되었다; '모터가 운동을 전달하는 부분'에 대한 특정한 기계적 감각은 1814년부터이다; 특히 1888년까지 자동차(자전거, 자동차 등)에 대한 것이다.[13]


톱니바퀴는 바퀴에 달린 이빨이다.From Middle English cogge, from Old Norse (compare Norwegian kugg ('cog'), Swedish kugg, kugge ('cog, tooth')), from Proto-Germanic *kuggō (compare Dutch kogge ('cogboat'), German Kock), from Proto-Indo-European *gugā ('hump, ball') (compare Lithuanian gugà ('pommel, hump, hill'), from PIE *gēw- ('to bend, arch').[14]c. 1300은 '바퀴가 톱니나 톱니바퀴를 가지고 있다; 14c 후반, '바퀴 위의 톱니'; 15c 초반의 의미로 처음 사용되었다.[15]
역사적으로 톱니바퀴는 금속이 아닌 나무로 만들어진 톱니였고, 기술적으로 톱니바퀴는 모티세 바퀴 주위에 위치한 일련의 나무 톱니들로 구성되었는데, 각 톱니들은 특수화된 '스루' 모티스와 테논 관절의 한 형태를 이루고 있다.바퀴는 나무, 주철 또는 다른 재료로 만들어질 수 있다.나무 톱니바퀴는 큰 금속 기어를 자를 수 없을 때, 주물 톱니가 거의 적절한 형태도 아니었을 때, 또는 바퀴의 크기가 제조를 비실용적으로 만들 때 사용되었던 것이다.[16]
톱니바퀴는 종종 단풍나무로 만들어졌다.1967년 뉴햄프셔 주 랭커스터의 톰슨 제조 회사는 여전히 매년 수만 개의 단풍나무 치아를 공급하는데 매우 적극적인 사업을 펼쳤으며, 일부는 100년 이상 된 제지공장과 그리스트 제분소에서 사용하기 위해 주로 사용되었다.[17]나무 톱니바퀴는 주물이나 가공된 금속 치아와 정확히 같은 기능을 하기 때문에 이 단어는 두 가지 모두에 연장하여 적용되었고, 그 구별은 일반적으로 없어졌다.
구동 메커니즘과의 비교
톱니가 기어를 제공하는 확실한 비율은 정확한 속도 비율에 따라 달라지는 시계와 같은 정밀 기계에서 다른 드라이브(트랙션 드라이브, V 벨트 등)에 비해 장점을 제공한다.드라이버와 팔로워가 근위부일 경우, 필요한 부품 수가 줄어든다는 점에서 기어 또한 다른 드라이브보다 유리하다.단점은 기어를 제조하는 데 더 비싸고 윤활 요건이 시간당 더 높은 운영비를 부과할 수 있다는 것이다.
종류들
외부 기어와 내부 기어 비교

외부 기어는 실린더나 원뿔의 외부 표면에 톱니가 형성된 기어를 말한다.반대로 내부 기어는 실린더나 원뿔의 내부 표면에 톱니가 형성된 기어를 말한다.베벨 기어의 경우 내부 기어는 피치 각도가 90도를 초과하는 기어다.내부 기어는 출력축 방향 반전을 유발하지 않는다.[18]
박차를 가하다

스퍼 기어 또는 직선 기어 기어는 가장 단순한 유형의 기어다.이들은 방사상으로 돌출된 톱니가 있는 실린더 또는 디스크로 구성된다.치아가 직선적이지는 않지만(대부분 비자발적이긴 하지만 덜 일반적으로 사이클로이드인 치아의 가장자리는 직선이고 회전축과 평행하게 정렬된다.이 기어는 병렬 축에 장착되는 경우에만 올바르게 맞물린다.[19]치아 하중에 의해 축방향 추력이 생성되지 않는다.스퍼 기어는 보통 속도에서는 훌륭하지만 고속에서는 소음이 발생하는 경향이 있다.[20]
헬리컬


나선형 또는 "건식 고정식" 기어는 스퍼 기어에 비해 정교함을 제공한다.치아의 앞쪽 가장자리는 회전축과 평행하지 않고 각도로 설정된다.기어가 구부러져 있기 때문에 이 앵글링은 이빨 모양을 나선의 한 부분으로 만든다.헬리컬 기어는 평행 또는 교차 방향으로 맞물릴 수 있다.전자는 축이 서로 평행할 때를 가리킨다; 이것이 가장 일반적인 방향이다.후자에서는 샤프트가 평행하지 않으며, 이 구성에서는 기어를 "스큐 기어"라고 부르기도 한다.
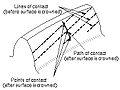
각진 치아는 톱니에 박차를 가하는 것보다 서서히 맞물리게 되어, 톱니가 더 부드럽고 조용히 뛰게 한다.[21]평행 나선 기어를 사용하는 경우, 각 톱니 쌍은 먼저 기어 바퀴의 한 쪽에 있는 한 지점에서 접촉한다. 접촉의 이동 곡선은 톱니 면 전체에서 최대까지 점진적으로 성장한 다음, 반대편의 한 지점에서 톱니가 접촉이 깨질 때까지 재생된다.스퍼 기어에서 톱니는 갑자기 전체 폭을 가로지르는 라인 접촉에서 만나 스트레스와 소음을 일으킨다.스퍼 기어는 고속에서 특유의 윙윙거리는 소리를 낸다.이러한 이유로 스퍼 기어는 저속 애플리케이션과 소음 제어에 문제가 없는 상황에서 사용되며 고속 애플리케이션, 대형 송전 또는 소음 방지가 중요한 상황에서 헬리컬 기어를 사용한다.[22]피치 라인 속도가 25m/s를 초과할 때 속도는 높은 것으로 간주된다.[23]
헬리컬 기어의 단점은 기어 축을 따라 발생하는 추력이며, 적절한 추력 베어링에 의해 수용되어야 한다.그러나 이 문제는 축방향 추력이 없는 청어본 기어 또는 이중 나선 기어를 사용할 경우 장점으로 전환될 수 있으며 기어 자체 정렬 기능도 제공한다.이는 비교 가능한 스퍼 기어보다 축방향 추력을 적게 초래한다.
헬리컬 기어의 두 번째 단점은 또한 윤활유 내 첨가제로 종종 다루어지는 메싱 톱니 사이의 슬라이딩 마찰의 더 큰 정도라는 것이다.
스큐 기어
"교차" 또는 "스큐" 구성의 경우 기어는 압력 각도와 정상적인 피치를 가져야 하지만 나선각과 손은 다를 수 있다.두 축 사이의 관계는 실제로 두 축의 나선각과 정의한 대로 손으로 정의된다.[24]
- = + 같은 손의 기어,
- = - 반대쪽 손 기어의 경우,


여기서 은 기어의 나선각이다.교차된 구성은 기어 사이에 점 접촉만 있을 뿐 평행한 구성에서는 선 접촉이 있기 때문에 기계적으로 덜 건전하다.[24]

매우 일반적으로 나선 기어는 나선의 각도와 함께 사용되는데, 나선의 각도가 다른 나선의 각도와 음이 같으며, 그러한 쌍은 오른손 나선과 왼손 나선의 각도가 동일하다고도 할 수 있다.두 개의 동일하지만 반대되는 각도는 0을 더한다: 축 사이의 각도는 0이다. 즉, 축은 평행이다.합계 또는 차이(위의 방정식에 기술된 바와 같이)가 0이 아닌 경우 샤프트는 교차한다.직각으로 교차하는 샤프트의 경우, 나선 각도는 90도를 더해야 하기 때문에 같은 손이다.(위 그림의 기어가 이에 해당함: 교차된 구성에서 기어가 정확하게 맞물림: 평행 구성의 경우 나선 각 중 하나를 반전시켜야 함.그림에 표시된 기어는 샤프트와 평행하게 맞물릴 수 없다.)
이중 나선형
.jpg)
이중 나선 기어는 반대 방향으로 비스듬히 기울어진 이중 톱니 세트를 사용하여 단일 나선 기어가 제시하는 축방향 추력 문제를 극복한다.이중 나선 기어는 두 개의 미러링된 나선 기어가 공통 차축에 가깝게 장착된 것으로 생각할 수 있다.이 배열은 기어의 각 반쪽이 반대 방향으로 추력되어 순 축력이 0이 되기 때문에 순 축 추력을 상쇄한다.이 배열은 또한 추력 베어링의 필요성을 제거할 수 있다.하지만 이중 나선 기어는 모양이 복잡해 제작이 더 어렵다.
청어본 기어는 특수한 종류의 나선 기어다.그들은 다른 이중 나선 기어들처럼 가운데 홈을 가지고 있지 않다; 거울로 된 두 개의 나선 기어들이 결합되어 그들의 이빨이 V자 모양을 형성한다.이는 시트로엥 타입 A의 최종 구동에서와 같이 베벨 기어에도 적용할 수 있다.
두 회전 방향 모두 반대 방향의 헬리컬 기어 또는 기어 면에 대해 두 가지 가능한 배치가 있다.한 가지 배열을 안정이라고 하고, 다른 하나는 불안정하다고 한다.안정적 배열에서 헬리컬 기어 면은 각 축력이 기어 중앙을 향하도록 방향을 정한다.불안정한 배열에서 두 축력은 기어 중심에서 멀리 향한다.어느 한 배열에서나 기어가 올바르게 정렬되었을 때 각 기어의 총 축력(또는 그물)은 0이다.기어가 축방향으로 잘못 정렬되면 불안정한 배열은 기어트레인 분해로 이어질 수 있는 순력을 발생시키는 반면, 안정적인 배열은 순교정력을 발생시킨다.회전 방향이 뒤바뀌면 축방향도 뒤바뀌기 때문에 안정적인 구성이 불안정해지고, 그 반대의 경우도 마찬가지다.
안정적인 이중 나선 기어는 다른 베어링 없이도 스퍼 기어와 직접 교환할 수 있다.
베벨


베벨 기어는 대부분의 끝이 잘려진 오른쪽 원형 원뿔모양이다.두 개의 베벨 기어가 맞물릴 때, 그들의 상상의 정점은 같은 지점을 차지해야 한다.이들의 축 축도 이 지점에서 교차하며 축들 사이에 임의의 비직선 각도를 형성한다.샤프트 사이의 각도는 0도 또는 180도를 제외한 모든 것이 될 수 있다.90도의 톱니와 샤프트 축 수가 동일한 베벨 기어를 미터(US) 또는 미트레(영국) 기어라고 한다.
나선형 베벨

나선형 베벨 기어는 글리슨형(불규칙한 치아 깊이의 원형 호), 오얼리콘과 커브렉스형(치아 깊이가 일정하지 않은 원형 호), 클링겔베르크 사이클로 팔로이드(치아 깊이가 일정하지 않은 에피시클로이드) 또는 클링겔베르크 팔로이드로 제조할 수 있다.나선형 베벨 기어는 나선형 기어가 기어를 가속하는 것과 같은 직선형 기어에 비해 장단점이 동일하다.직선 베벨 기어는 일반적으로 5m/s(1000ft/min) 미만의 속도에서 또는 소형 기어의 경우 1000r.p.m의 속도에서만 사용된다.[25]
참고: 원통형 기어 톱니 프로필은 비자발적 기어에 해당하지만 베벨 기어 톱니 프로필은 옥토이드에 해당된다.모든 전통적인 베벨 기어 발전기(Gleason, Klingelnberg, Heidenreic & Harbeck, WMW Modul 등)는 8각형 톱니 모양의 베벨 기어를 제조한다.중요: 5축 밀링 베벨 기어 세트의 경우 기존 제조 방법과 동일한 계산/배열을 선택하는 것이 중요하다.무의식적인 치아 형태가 있는 정상 부분의 등가 원통형 기어를 기반으로 단순화된 계산된 베벨 기어는 치아 강도가 오프셋 없이 10-28%, 오프셋 [Diss]로 45% 감소된 일탈형 치아 형태를 보여준다.휴넥케, TU 드레스덴.게다가, "인볼루트 베벨 기어 세트"는 더 많은 소음을 유발한다.
하이포이드

하이포이드 기어는 축 축 축이 교차하지 않는 경우를 제외하고 나선형 베벨 기어와 유사하다.피치 표면은 원뿔처럼 보이지만, 오프셋 샤프트를 보상하기 위해 사실 혁명의 하이퍼볼로이드들이다.[26][27]하이포이드 기어는 거의 항상 90도의 샤프트로 작동하도록 설계되어 있다.샤프트가 어느 쪽에 오프셋되느냐에 따라, 치아의 각도에 비례하여 하이포이드 기어 톱니 사이의 접촉은 나선형 베벨 기어 톱니보다 훨씬 부드럽고 점진적일 수 있지만, 또한 회전할 때 메싱 톱니를 따라 슬라이딩 작용이 일어나기 때문에 대개 이를 피하기 위해 가장 점성이 높은 유형의 기어 오일이 필요하다.접합 치아의 표면에서 돌출된 오일은 보통 HP(하이포이드의 경우)로 지정되고 그 뒤에 점도를 나타내는 숫자가 나타난다.또한 피니언은 나선형 베벨 피니언보다 더 적은 톱니로 설계할 수 있으며, 그 결과 하이포이드 기어 한 세트를 사용하여 기어비가 60:1 이상이면 실현 가능하다.[28]이러한 스타일의 기어는 차동장치와 함께 자동차 구동렬에서 가장 흔하다.일반(비하이포이드) 링 앤 피니언 기어 세트는 많은 용도에 적합한 반면, 하이포이드보다 더 많은 소음과 진동을 발생시키기 때문에 차량 구동렬에는 적합하지 않다.하이포이드 기어를 대량 생산 애플리케이션 시장에 출시하는 것은 1920년대의 엔지니어링 개선이었다.
왕관

크라운 기어 또는 컨스트레이트 기어는 톱니가 휠의 평면에 직각으로 돌출되는 베벨 기어의 특정한 형태로서, 그 방향에서 톱니는 크라운의 포인트와 유사하다.크라운 기어는 다른 베벨 기어와 정확하게 맞물릴 수 있을 뿐이지만, 크라운 기어가 스퍼 기어와 맞물리는 경우도 있다.크라운 기어는 기계식 시계에서 발견되는 것과 같은 탈출구와 맞물리기도 한다.
웜


벌레는 나사를 닮았다.지렁이는 스퍼 기어와 비슷하게 생긴 지렁이 바퀴에 매어 있다.
웜 앤 기어 세트는 단순하고 컴팩트한 방법으로 높은 토크, 저속 기어비를 달성할 수 있다.예를 들어 헬리컬 기어는 일반적으로 기어비가 10:1 미만인 반면 웜 앤 기어 세트는 10:1에서 500:1로 다양하다.[29]단점은 상당한 슬라이딩 동작이 가능하여 효율성이 낮다는 것이다.[30]
웜 기어는 헬리컬 기어의 일종이지만 나선각은 보통 어느 정도 크고(90도에 가까우며), 몸은 축방향으로 상당히 길다.이런 속성들은 그것에게 나사와 같은 자질을 준다.벌레와 헬리컬 기어의 구별은 나선을 완전히 회전하기 위해 적어도 하나의 치아가 유지된다는 것이다.이렇게 되면 '벌레'이고, 그렇지 않으면 '헬리컬 기어'이다.지렁이는 이빨이 하나만큼 작을 수도 있다.만약 그 이빨이 나선형 주위를 몇 바퀴 돌면, 그 벌레는 표면적으로는 한 개 이상의 이빨을 가지기 위해 나타나지만, 사실 한 사람이 보는 것은 같은 이빨이 벌레의 길이를 따라 간격을 두고 다시 나타나는 것이다.일반적인 나사 명명법이 적용된다. 단발성 지렁이를 단일 나사산 또는 단일 시작이라고 하고, 둘 이상의 치아를 가진 지렁이를 다중 나사산 또는 다중 시작이라고 한다.지렁이의 나선각은 보통 명시되어 있지 않다.대신 나선각을 뺀 90도에 해당하는 납각이 주어진다.
웜 앤 기어 세트에서, 웜은 항상 기어를 운전할 수 있다.그러나 기어가 지렁이를 몰려고 하면 성공할 수도 있고 실패할 수도 있다.특히 납각이 작을 경우, 벌레에 대한 원주적인 힘 성분이 마찰을 극복하기에 충분하지 않기 때문에 기어의 톱니가 벌레의 이빨에 대해 간단히 잠길 수 있다.그러나 전통 음악상자에서는 이 기어가 나선각도가 큰 지렁이를 움직인다.이 메쉬는 웜 샤프트에 장착된 속도 제한 베인을 구동한다.
잠금을 하는 웜 앤 기어 세트를 자기 잠금이라고 하는데, 마치 웜을 돌려서 메커니즘의 위치를 설정한 다음 메커니즘이 그 위치를 잡도록 하는 것이 원할 때처럼 이점에 사용할 수 있다.예를 들어, 현악기의 일부 유형에서 기계 헤드가 발견된다.
웜 앤 기어 세트의 기어가 일반적인 헬리컬 기어일 경우 단 하나의 접촉점만 달성된다.[28][31]중력에서 고출력 송신이 필요할 경우 기어의 톱니 모양을 변형하여 양쪽 기어가 부분적으로 서로 감싸도록 하여 보다 밀접하게 접촉할 수 있도록 한다.이것은 오목하게 만들거나 안장 지점에서 결합함으로써 이루어진다. 이것을 원추 드라이브[32] 또는 "이중 포장"이라고 한다.
웜 기어는 나사산에 대해 오랫동안 확립된 관행에 따라 오른손 또는 왼손잡이 기어가 될 수 있다.[18]
비원형

비원형 기어는 특수 목적을 위해 설계된다.일반 기어는 최소 소음과 마모 및 최대 효율을 가진 다른 결합 구성원에 토크를 전달하도록 최적화되지만, 비원형 기어의 주요 목표는 비율 변화, 액슬 변위 진동 등이 될 수 있다.일반적인 애플리케이션에는 섬유 기계, 전위차계 및 연속 가변 변속기가 포함된다.
랙 및 피니언

랙은 곡률 반경이 무한히 큰 섹터 기어라고 생각할 수 있는 톱니 모양의 막대나 막대를 말한다.토크는 랙을 피니언(피니언: 피니언 회전)이라고 하는 둥근 기어로 메싱하여 선형력으로 변환할 수 있으며, 랙은 직선으로 움직인다.이러한 메커니즘은 자동차에서 핸들의 회전을 타이 로드의 좌우 운동으로 변환하기 위해 사용된다.
랙은 기어 기하학 이론에서도 특징지어지는데, 예를 들어, 교환 가능한 기어 세트의 톱니 모양은 랙(무한 반지름)에 대해 지정할 수 있고, 특정 실제 반지름 기어에 대한 톱니 모양은 그로부터 파생된다.랙과 피니언 기어 타입은 랙 철로에서도 사용된다.
에피사이클릭

에피사이클릭 기어에서는 하나 이상의 기어 축이 움직인다.예로는 태양 및 유성 기어(아래 참조), 사이클로이드 구동, 자동 변속기 및 기계적 디퍼렌셜이 있다.
태양과 행성

태양과 행성 기어링은 왕복운동을 증기기관에서 사용하던 회전운동으로 전환하는 방법이다.제임스 와트는 크랭크의 특허를 따내기 위해 초기 증기 엔진에 사용했지만, 와트가 더 가벼운 플라이휠을 사용할 수 있도록 플라이휠 속도를 높이는 이점도 제공했다.
그림에서 태양은 노란색, 행성은 빨간색, 왕복 팔은 파란색, 플라이휠은 녹색, 구동축은 회색이다.
조화 기어

조화 기어 또는 변형파 기어는 백래시 부족, 소형성 및 높은 기어비를 포함하여 전통적인 기어 시스템보다 장점을 위해 산업 운동 제어, 로봇 공학 및 항공우주 분야에서 자주 사용되는 특수 기어 메커니즘이다.
다이어그램은 정확한 구성을 보여주지는 않지만, 일반적으로 더 높은 정밀도를 보장하기 위해 전통적인 기어보다 훨씬 더 많은 톱니를 가진 "타이밍 기어"이다.
케이지 기어

랜턴 기어 또는 랜턴 피니언이라고도 불리는 케이지 기어는 치아를 위한 원통형 막대를 가지고 있으며, 차축과 평행하고 그 둘레에 원형으로 배열되어 있는데, 둥근 새장이나 랜턴의 막대기와 같다.어셈블리는 각 끝의 디스크에 의해 함께 고정되며, 그 안에 톱니 로드와 액슬이 설치된다.케이지 기어는 고체 피니온보다 효율이 높고,[citation needed] 끼여서 마모를 늘리기보다는 로드를 통해 먼지가 떨어질 수 있다.치아가 절단이나 밀링으로 형성되는 것이 아니라 구멍을 뚫고 봉을 삽입하는 방식으로 매우 간단한 공구로 시공할 수 있다.
때때로 시계에서 사용되는 케이지 기어는 항상 기어 바퀴에 의해 구동되어야 하며 운전자로 사용되어서는 안 된다.그 새장 기어는 처음에는 보수적인 시계 제조업자들이 선호하지 않았다.더러운 작업환경이 가장 흔한 터렛 시계에서 유행했다.국내 미국의 시계 동작은 종종 그것들을 사용했다.
사이클로이드 기어
자기 기어
자기 기어의 각 기어 구성 요소의 모든 톱니바퀴는 접합 표면의 반대편 자기 극을 주기적으로 번갈아 가며 일정한 자석의 역할을 한다.기어 부품은 다른 기계 기어와 유사한 백래시 기능을 탑재한다.자기장 강도에 한계가 있어 기존 기어만큼의 힘을 발휘할 수 없지만 이런 기어는 만지지 않고 작동해 마모에 대한 면역력이 있고 소음도 매우 낮고 마찰로 인한 전력 손실도 없으며 손상 없이 미끄러질 수 있어 신뢰성이 매우 높다.[33]이들은 물리적으로 접촉해야 하는 기어가 불가능한 구성에서 사용할 수 있으며, 하중으로부터 구동력을 완전히 분리하는 비금속 장벽으로 작동할 수 있다.자기 연결 장치는 누출될 수 있는 방사형 샤프트 씰을 사용하지 않고 밀폐된 밀폐 인클로저로 힘을 전달할 수 있다.
명명법
일반

- 회전 주파수, n
- 분당 회전수(RPM 또는 RPM)와 같이 시간에 따라 회전하여 측정한다.
- 각도 주파수, Ω
- 라디안/초 단위로 측정한다. 1RPM = 2π rad/분 = π/30 rad/초
- 치아의 수, N
- 기어 하나에 몇 개의 톱니, 정수.지렁이의 경우 지렁이가 가지고 있는 실의 시작 횟수다.
- 기어, 휠
- 상호 작용하는 두 기어 또는 기어 자체 중 더 큰 기어.
- 피니언
- 상호 작용하는 두 기어 중 작은 기어.
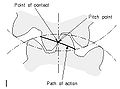
- 접촉경로
- 경로 다음에 두 메싱 기어 톱니 사이의 접촉점이 나타난다.
- 작용선, 압력선
- 두 메싱 기어 톱니 사이의 힘이 향하는 라인.힘 벡터와 같은 방향을 가지고 있다.일반적으로 한 쌍의 치아가 맞물리는 기간 동안 행동의 선이 시시각각으로 바뀐다.그러나 비자발 기어의 경우 톱니바퀴의 힘은 항상 같은 선(즉, 작용선이 일정함)을 따라 향한다.이는 비자발 기어의 경우 접촉 경로도 실제와 같이 동작 라인과 일치하는 직선임을 의미한다.
- 축
- 기어의 회전 축, 축의 중심선.
- 피치 포인트
- 동작 선이 두 기어 축을 연결하는 선을 교차하는 지점.
- 피치 원, 피치 라인
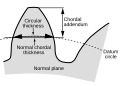
- 원은 축을 중심으로 수직이며 피치점을 통과한다.원형 톱니 두께, 압력 각도 및 나선 각도가 정의된 기어의 미리 정의된 직경 위치.
- 피치 지름, d
- 원형 톱니 두께, 압력 각도 및 나선 각도가 정의된 기어의 미리 정의된 직경 위치.표준 피치 직경은 설계 치수여서 측정할 수 없지만 다른 측정이 이루어지는 곳이다.이의 값은 톱니 수(N), 정상 모듈(mn; 또는 정상 직경 피치d, P), 나선 각도( } )에 기초한다.
- = 미터법 단위 d = [34]\ d



- 모듈 또는 계량, m
- 비합리적인 숫자로 원형 피치를 계산하는 것은 비현실적이기 때문에 기계 공학자들은 보통 그것을 대신 정규 값으로 대체하는 스케일링 계수를 사용한다.이를 휠의 모듈 또는 계수로 알려져 있으며 단순히 다음과 같이 정의된다.
- 여기서 m은 모듈이고 p는 원형 피치다.모듈의 단위는 관례적으로 밀리미터로 되어 있다. 영어 모듈은 인치 단위로 사용되기도 한다.직경 피치인 DP가 영어 단위에 있을 때,
- =
- 두 축 사이의 거리는 다음과 같다.
- 여기서 a는 축 거리, z와1 z는2 두 바퀴 각각에 대한 톱니바퀴의 수(teeth)이다.이러한 숫자(또는 적어도 그 중 하나)는 종종 양쪽 바퀴의 모든 톱니바퀴 사이에 고른 접촉을 만들어 불필요한 마모 및 손상을 피하기 위해 프리타임 중에서 선택된다.균일한 기어 마모는 서로 맞물리는 두 기어의 톱니 계수가 서로 상대적으로 프라이밍되도록 보장함으로써 달성된다. 이는 각 기어 톱니 계수의 최대 공통 디비저(GCD)가 1과 같을 때 발생한다. 예를 들어 GCD(16,25)=1; 1:1 기어비를 원하는 경우 두 기어 사이에 상대적으로 프라이밍 기어를 삽입할 수 있다. 이 유지a1:1 비이지만 기어 방향을 반대로 한다. 이 경우 두 번째 비교적 프라임 기어를 삽입하여 원래 회전 방향을 복원하는 동시에 4개의 기어 모두에서 균일한 마모를 유지할 수 있다.적어도 유럽 대륙에서는 기계 공학자들이 보통 원형 피치 대신 모듈을 사용한다.이 모듈은 원형 피치와 마찬가지로 진화 기반의 직선 톱니바퀴가 아닌 모든 유형의 톱니바퀴에 사용할 수 있다.[35]
- 작동 피치 지름
- 톱니 수와 기어가 작동하는 중심 거리를 통해 결정되는 지름.[18]피니언의 예:




- 피치 표면
- 원통형 기어에서, 원통형 기어는 축방향으로 피치 원을 투사하여 형성된다.보다 일반적으로, 축을 따라 움직이면서 모든 피치 원의 합에 의해 형성된 표면이다.베벨 기어의 경우 원뿔이다.
- 작용각
- 기어 중앙의 꼭지점, 짝짓기 톱니가 처음 접촉하는 지점의 한쪽 다리와 분리되는 지점의 다른 쪽 다리로 각도한다.
- 행동의 호
- 동작 각도로 하위화된 피치 원의 세그먼트.
- 압력 각도,
- 톱니가 서로에게 힘을 발휘하는 방향과 두 기어의 중심에 연결되는 선 사이의 각도를 보완한다.비자발 기어의 경우 톱니는 항상 동작 라인을 따라 힘을 발휘하며, 비자발 기어의 경우 직선이기 때문에 비자발 기어의 경우 압력 각도가 일정하다.
- 외경,
- 톱니 상단에서 측정한 기어 직경.
- 뿌리 지름
- 톱니 밑부분에서 측정한 기어의 직경.
- 부록, a
- 피치 표면에서 치아의 가장 바깥쪽 지점까지의 반지름 a = 2 (- ) }:{2
- 데덴덤, b
- 치아 수조의 깊이에서 피치 표면까지의 방사상 거리. = (- )
- 전체 깊이,
- 치아의 윗부분에서 뿌리까지의 거리; 덧셈과 덧셈과 같거나 작업 깊이와 간격과 같다.
- 간격
- 기어의 뿌리 원과 짝의 부속 원 사이의 거리.
- 작업 깊이
- 두 기어의 결합 깊이, 즉 작동 부속품의 합계.
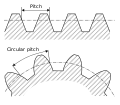
- 원형 피치, p
- 피치 원을 따라 측정한 동일한 기어에서 치아의 한 면으로부터 인접한 치아의 해당 면까지의 거리.
- 직경 피치, DP
-
- 피치 직경에 대한 톱니 수의 비율.인치 당 톱니 또는 센티미터 당 톱니로 측정할 수 있지만, 일반적으로 직경 당 단위가 있다.m 모듈이 메트릭 단위로 표시되는 위치
- 영어 단위


- 베이스 서클
- 비자발 기어에서 톱니 프로필은 베이스 원의 비자발성에 의해 생성된다.베이스 원의 반지름은 피치 원의 반지름보다 다소 작다.
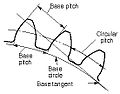
- 베이스 피치, 일반 피치, b 디스플레이
- 비자발 기어에서, 동일한 기어에서 치아의 한 면으로부터 인접한 치아의 해당 면까지의 거리(기본 원을 따라 측정됨)
- 간섭
- 표면의 의도된 부분이 아닌 톱니 사이의 접촉
- 교환가능세트
- 기어 세트 중 어느 것이든 다른 기어와 올바르게 짝을 맞춘다.
헬리컬 기어
- Helix 각도,
- 나선에 접하는 접선과 기어 축 사이의 각도.스퍼 기어의 제한 사례에서는 0이지만 저선 사용 각도로 간주할 수 있다.
- 일반 원형 피치,
- 평면 내 원형 피치는 톱니까지 정상이다.
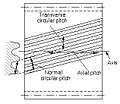
- 가로 원형 피치, p
- 기어 회전면의 원형 피치.그냥 "순환 피치"라고 부르기도 한다. = ( )
몇 개의 다른 나선형 매개변수는 일반 평면 또는 횡단면에서 볼 수 있다.첨자 n은 보통 정규 분포를 나타낸다.
웜 기어
- 이끌다
- 나사산의 임의 지점에서 동일한 나사산의 다음 회전 시 해당 지점까지의 거리(축에 평행하게 측정됨).
- 선형 피치, p
- 나사산의 임의 지점에서 인접한 나사산의 해당 지점까지의 거리(축에 평행하게 측정).단일 스레드 웜의 경우 리드 피치와 선형 피치가 동일하다.
- 리드 각도,
- 나선에 대한 접선과 축에 수직인 평면 사이의 각도.나선각의 보완은 일반적으로 나선 기어에 대해 제공된다는 점에 유의하십시오.
- 피치 지름,
- 이 목록의 앞부분에서 설명한 것과 동일하다.웜의 경우 기울어진 평면이 아닌 기어 축에 수직인 평면에서 측정된다는 점에 유의하십시오.
웜을 나타내는 첨자와 기어를 나타내는 첨자 g는 기어를 나타낸다.
치아 접촉

연락선
행동경로

행동선

행동면
접촉선(헬리컬 기어)

행동의 호

작용 길이

한계 직경
페이스 어드밴스

행동 구역










- 접촉점
- 두 개의 치아 프로필이 서로 접촉하는 지점.
- 연락선
- 두 개의 치아 표면이 서로 접하는 선 또는 곡선.
- 행동경로
- 결합 단계 동안 기어 톱니 쌍 사이의 연속 접촉 지점의 위치.결합 기어 톱니의 경우 동작 경로가 피치 지점을 통과한다.회전면에서 작용 표면의 흔적이다.
- 행동선
- 비자발 기어의 동작 경로.피치점을 지나 양쪽 베이스 서클에 접하는 직선이다.
- 작용표면
- 맞물리는 두 개의 치아 표면 사이에 접촉하는 상상의 표면.이는 맞물리는 치아의 모든 부분에서 작용 경로를 합한 것이다.
- 행동면
- 톱니 또는 나선형 톱니가 있는 비자발 평행 축 기어의 작동 표면.그것은 베이스 실린더에 접해 있다.
- 조치 구역(접촉 구역)
- 스퍼 또는 나선형 톱니가 있는 비자발적인 병렬 축 기어의 경우, 동작의 길이와 유효 얼굴 폭에 의해 경계된 동작 평면의 직사각형 영역이다.
- 접촉경로
- 크라운형 톱니 표면으로 기어를 결합하는 동안 이론적 단일 점 접촉이 발생하는 양쪽 치아 표면의 곡선 또는 일반적으로 단일 점 접촉으로만 결합되는 기어.
- 작용 길이
- 치아 프로필의 작용 중에 접촉점이 이동하는 동작 라인의 거리.
- 작용 호, Qt
- 치아 프로필이 접합 프로필과 접촉하는 시작부터 끝까지 이동하는 피치 원의 호.
- 접근 호, Qa
- 치아 프로필이 접촉 시작점에서 피치 지점에 도착할 때까지 이동하는 피치 원의 호.
- 휴회의r 호, Q
- 치아 프로필이 피치 지점의 접촉에서 접촉이 끝날 때까지 이동하는 피치 원의 호.
- 접촉비, m, εc
- 치아 표면이 접촉 시작부터 끝까지 회전하는 각도 투구 수입니다.간단히 말하면, 이는 치아가 짝짓기 기어와 접촉하지 않는 기간 동안 접촉하는 치아의 평균 수를 측정한 것으로 정의할 수 있다.
- 횡접점비, m, εpα
- 횡단면에서의 접촉 비율.각진 피치에 대한 작용 각도의 비율이다.비자발 기어의 경우 베이스 피치에 대한 동작 길이의 비율로 가장 직접적으로 얻어진다.
- 얼굴 접촉비, mF, εβ
- 축면에서의 접촉 비율 또는 축 피치에 대한 면 폭의 비율.베벨 기어와 하이포이드 기어에서 그것은 원형 피치에 대한 얼굴 진전의 비율이다.
- 총접점비율, mt, εγ
- 횡방향 접촉 비율과 얼굴 접촉 비율의 합계.


- 수정된o 접점 비율, m
- 베벨 기어의 경우 가로 및 면 접촉 비율의 제곱합 제곱근.

- 한계 직경
- 작용선이 접합 기어의 최대(또는 내부 피니언의 경우 최소) 부속 원과 교차하는 기어의 직경.이를 활성 프로파일의 시작, 접촉 시작, 접촉 종료 또는 활성 프로파일의 종료라고도 한다.
- 활성 프로필 시작(SAP)
- 한계 직경과 비자발 프로필의 교차점.
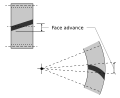
- 페이스 어드밴스
- 나선형 또는 나선형 치아가 피치 표면의 치아 추적의 한쪽 끝에서 접촉이 시작되는 위치에서 다른 쪽 끝에서 접촉이 중지되는 위치까지 이동하는 피치 원의 거리.
치아두께

치아두께

두께 관계
화음두께

핀에 대한 톱니 두께 측정

스팬 측정

길고 짧은 덧니






- 원형두께
- 지정된 기준점 원 상의 기어 톱니 양면 사이의 호 길이.
- 가로 원형두께
- 횡단면의 원형 두께.
- 정상 원형두께
- 일반 평면의 원형 두께.나선 기어에서 그것은 일반적인 나선형을 따라 호의 길이로 간주될 수 있다.
- 축두께
- 헬리컬 기어와 웜의 경우 표준 피치 직경에서 축 단면의 톱니 두께.
- 베이스 원형두께
- 비자발 치아의 경우, 치아의 프로파일을 형성하는 두 비자발 곡선 사이의 베이스 원에 있는 호 길이.
- 정상 화음두께
- 피치나선에 정규적인 평면에서 원형 두께 호를 소계하는 화음의 길이.모든 편리한 측정 직경을 선택할 수 있으며, 반드시 표준 피치 직경은 아니다.
- 현악부록(계단 높이)
- 치아의 상단에서부터 원형의 두께 호를 중첩하는 현까지의 높이.모든 편리한 측정 직경을 선택할 수 있으며, 반드시 표준 피치 직경은 아니다.
- 종단 시프트
- 기준 실린더에서 기본 랙 기준선을 변위시키고, 일반 모듈로 나누어 비차원화한다.치아 두께를 명시하기 위해 사용되며, 백래시가 없는 경우가 많다.
- 랙 시프트
- 툴 기준선을 기준 실린더에서 변위시키고, 일반 모듈로 나누어 비차원화한다.이는 치아의 두께를 명시하기 위해 사용된다.
- 핀에 대한 측정
- 치아 공간과 기준 표면에 위치한 핀 위로 이동한 거리 측정.기준 표면은 기어의 기준 축, 기준점 표면 또는 치아 공간 또는 첫 번째 반대쪽 공간에 위치한 하나 또는 두 개의 핀이 될 수 있다.이 측정은 치아 두께를 결정하는 데 사용된다.
- 스팬 측정
- 일반 평면에서 여러 개의 톱니에 걸친 거리 측정.측정기기에 변형되지 않은 비수정 부분에 접촉하는 평행 측정 표면이 있는 한, 측정은 기본 실린더에 접하는 선을 따라 움직인다.그것은 치아 두께를 결정하는 데 사용된다.
- 수정부당치
- 맞물리는 기어의 톱니, 하나 또는 둘 다 비표준 부록이 있다.
- 완전치
- 작업 깊이가 2.000과 동일한 치아를 정상 직경 피치로 나눈 치어.
- 단아치
- 작업 깊이가 2,000 미만인 톱니는 정상 직경 피치로 나눈 값이다.
- 등부속치
- 맞물리는 두 개의 기어가 동일한 부록을 갖는 톱니.
- 길고 짧은 덧니
- 맞물리는 기어 두 개의 부속품이 같지 않은 톱니.
피치
피치는 한 치아의 점과 인접한 치아의 해당 지점 사이의 거리를 말한다.[18]가로 방향, 정규 방향 또는 축 방향에서 선이나 곡선을 따라 측정한 치수다.자격 없는 단어의 피치 사용은 모호할 수 있으며, 이러한 이유로 가로 원형 피치, 일반 베이스 피치, 축 피치 등과 같은 특정 명칭을 사용하는 것이 바람직하다.
피치
치아 피치

베이스 피치 관계
주구




- 원형 피치, p
- 인접한 톱니의 해당 프로필 사이의 피치 원 또는 피치 선을 따라 호 거리.
- 가로t 원형 피치, p
- 횡단면의 원형 피치.
- 일반 원형 피치, pne, p
- 정상 평면의 원형 피치 및 나선형 톱니 또는 나사산 사이의 정상 피치 나선을 따라 있는 호 길이.
- 축x 피치, p
- 축 평면 및 피치 표면의 선형 피치.헬리컬 기어와 웜에서 축 피치는 모든 직경에서 동일한 값을 갖는다.다른 유형의 기어에서 축 피치는 피치 표면으로 제한될 수 있으며 원형 측정일 수 있다.축 피치라는 용어는 선형 피치라는 용어보다 선호된다.헬리컬 웜의 축 피치와 웜 기어의 원형 피치는 동일하다.
- 일반bn 베이스 피치, pN, p
- 무의식적인 헬리컬 기어는 정상 평면에서 기본 피칭이다.정상 평면에서 작용 평면에 평행한 나선 비자발 표면 사이의 정상 거리 또는 정상 베이스 나선의 호 길이입니다.그것은 어떤 나선적 비자발적 기어에서도 일정한 거리다.
- 가로bt 베이스 피치, pb, p
- 무의식적인 기어에서 피치는 베이스 서클이나 동작 라인을 따라 움직인다.비자발 기어 톱니의 해당 측면은 평행 곡선이며, 베이스 피치는 횡단면에서 공통적인 정상부를 따라 이들 사이의 일정하고 근본적인 거리를 말한다.
- 직경d 피치(횡단), P
- 표준 피치 직경에 대한 톱니 수의 비율(인치)

- 정상 직경 피치, Pnd
- 헬리컬 기어 또는 웜의 일반 평면에서 직경 피치의 값.

- 각도 피치, θN, τ
- 보통 라디안으로 표현되는 원형 피치에 의해 소계되는 각도.
- = z 도 또는 z 라디안
 또는
또는 
백래시
백래시는 기어가 방향을 바꿀 때 발생하는 동작 오류다.구동 톱니의 후행 면과 구동 기어에서 그 뒤의 톱니 앞면 사이에는 항상 약간의 간격이 있고, 그 간극은 닫아야 새로운 방향으로 힘이 전달될 수 있기 때문이다."백래시"라는 용어는 단순히 그것이 야기하는 현상이 아니라 간격의 크기를 지칭하기 위해 사용될 수 있다. 따라서, 한 쌍의 기어를 "0.1 mm의 백래시"라고 말할 수 있다.한 쌍의 기어는 백래시가 발생하지 않도록 설계할 수 있지만, 이는 제조 시 완벽성과 시스템 전체에 걸쳐 균일한 열팽창 특성 및 윤활유가 없는 것을 전제로 한다.따라서 기어 쌍은 약간의 백래시를 갖도록 설계된다.보통 각 기어의 톱니 두께를 원하는 간격 거리의 절반으로 줄여 제공한다.그러나 큰 기어와 작은 피니언의 경우 백래시는 보통 기어에서 완전히 떼어내고 피니언에는 완전한 크기의 톱니가 주어진다.백래쉬는 기어를 더 멀리 이동시킴으로써 제공될 수도 있다.기어 트레인의 백래시는 각 기어 쌍의 백래시의 합계와 같기 때문에 긴 열차에서는 백래시가 문제가 될 수 있다.
계측제어 등 정밀도가 요구되는 상황의 경우 몇 가지 기법 중 하나를 통해 백래시를 최소화할 수 있다.예를 들어, 기어는 축에 수직인 평면을 따라 분할될 수 있으며, 하나는 축에 고정되고, 다른 하나는 축에 고정되며, 다른 하나는 축을 중심으로 자유롭게 회전할 수 있지만, 스프링은 두 개의 활자 사이에 상대적인 토크를 제공하여, 하나는 실제로 팽창하는 톱니를 가진 단일 기어를 달성할 수 있다.또 다른 방법은 톱니를 축 방향으로 테이퍼링하고 기어가 축 방향으로 미끄러지도록 하는 것이다.
기어 변속
일부 기계(예: 자동차)에서는 기어 변속 또는 기어 변속이라고 알려진 프로세스인 과제에 맞게 기어비를 변경할 필요가 있다.기어를 변속하는 방법에는 다음과 같은 몇 가지가 있다.
자동차에서 기어 변속의 몇 가지 결과가 있다.차량 소음 배출의 경우, 차량이 저단 기어를 사용할 때 더 높은 소음 레벨이 발생한다.저비 기어의 설계 수명은 짧기 때문에 저비례 기어를 사용할 수 있는데, 높은 비율에 사용되는 나선 기어보다 오버랩 비율이 작고 메쉬 강성 등이 낮아 더 많은 소음을 발생시키는 경향이 있다.이러한 사실은 1960년대 후반부터 차량 생성 소리를 분석하기 위해 사용되어 왔으며, 도시 도로 소음의 시뮬레이션과 도로변 도시 소음 장벽의 해당 설계에 통합되어 왔다.[36]
치아 프로필

스퍼 기어의 프로필
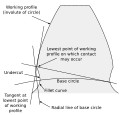
언더컷


프로필은 외부 원과 뿌리 원 사이의 단면에 있는 치아의 한 면이다.일반적으로 종단은 가로, 정규 또는 축면과 같이 피치 표면에 정상적인 평면 또는 표면과 치아의 교차점 곡선이다.
모깎기 곡선(뿌리 모깎기)은 치아 종단의 오목한 부분으로, 치아의 공간 하단과 결합한다.2
기사의 시작 부분에 언급했듯이, 비유도 속도비 달성 여부는 치아의 프로필에 따라 결정된다.두 기어 사이의 마찰과 마모도 치아 프로필에 따라 달라진다.일정 속도 비율을 제공하는 치아 프로필이 매우 많다.대부분의 경우 임의의 치아 모양을 볼 때, 짝짓기 기어의 치아 프로파일을 개발하여 일정한 속도비를 제공하는 것이 가능하다.그러나 현대에 가장 많이 사용되는 것은 사이클로이드와 비자발자.사이클로이드는 1800년대 후반까지 더 흔했다.그 이후, 특히 드라이브 트레인 애플리케이션에서 비자발자가 그것을 대체했다.사이클로이드는 어떤 면에서는 더 흥미롭고 유연한 형태지만, 비자발자는 두 가지 장점을 가지고 있다. 즉, 제작이 용이하며, 기어들의 중심 대 중심 간격은 속도비의 항상성을 망치지 않고 일정 범위에 걸쳐 변화할 수 있다.사이클로이드 기어는 중심 간격이 정확히 맞아야 제대로 작동한다.사이클로이드 기어는 여전히 기계식 시계에서 사용된다.
언더컷(undercut)은 필릿 곡선의 어떤 부분이 필릿과 그 고비인 지점에서 작업 프로파일에 접하는 선 안에 있을 때 생성된 기어 톱니의 상태를 말한다.언더컷은 마감 작업을 용이하게 하기 위해 의도적으로 도입될 수 있다.언더컷을 사용할 경우 필릿 곡선이 작업 프로필과 교차한다.모깎기 곡선을 언더컷하지 않고 작업 프로파일은 공통 접선을 가진다.
기어 재료

기어의 제조에는 수많은 비철 합금, 주철, 분말금속 및 플라스틱이 사용된다.그러나 강철은 강도 대 중량 비율이 높고 비용이 저렴하기 때문에 가장 많이 사용된다.플라스틱은 일반적으로 비용이나 무게가 중요한 곳에 사용된다.적절하게 설계된 플라스틱 기어는 먼지 내성, 저속 메싱, 꽤 잘[37] 미끄러지는 능력, 추가 윤활이 필요 없는 재료로 만들어지는 능력 등 바람직한 특성이 많기 때문에 많은 경우에 강철을 대체할 수 있다.제조업체들은 복사기, 광학 저장 장치, 값싼 동력장치, 소비자 오디오 장비, 서보 모터, 프린터를 포함한 소비자 품목의 비용을 줄이기 위해 플라스틱 기어를 사용해 왔다.플라스틱 사용의 또 다른 이점은 이전에 (1980년대와 같은) 특정 고가의 기계에 대한 수리비 절감이었다.심한 걸림(프린터의 종이와 같이)의 경우 플라스틱 기어 톱니가 기질에서 분리되어 구동 메커니즘이 자유롭게 회전할 수 있게 된다(잼에 걸려 스스로 손상되는 대신).이러한 "희생적" 기어 톱니의 사용은 훨씬 더 비싼 모터와 관련 부품을 파괴하는 것을 피했다.이 방법은 최근 설계에서 클러치와 토크 또는 전류 제한 모터의 사용으로 대체되었다.
표준 피치 및 모듈 시스템
어떤 투구로도 기어를 만들 수 있지만 편의성과 호환성을 위해 표준 투구를 자주 사용한다.피치는 선형 치수와 관련된 속성으로서 표준 값이 영국식(인치) 또는 미터법 시스템에 있는지 여부가 다르다.인치 측정을 사용하여 "인치당" 단위의 표준 직경 피치 값을 선택한다. 직경 피치는 1인치 피치 직경의 기어의 톱니 수입니다.스퍼 기어의 공통 표준 값은 3, 4, 5, 6, 8, 10, 12, 16, 20, 32, 32, 48, 64, 72, 80, 96, 100, 120, 200이다.[38]선형 랙과 맞물리는 1/10인치 및 1/20인치 측정과 같은 특정 표준 피치는 실제로 "인치" 단위의 (선형)[38] 원형 피치 값이다.
기어 치수가 미터법 시스템에 있을 때 피치 사양은 일반적으로 모듈 또는 계량 단위로 되어 있는데, 이는 피치 직경에 걸친 길이 측정이다.모듈이라는 용어는 치아의 수로 나눈 밀리미터 단위의 피치 직경을 의미하는 것으로 이해된다.모듈이 인치 측정에 기초할 때 미터법 모듈과의 혼동을 방지하기 위해 영어 모듈이라고 한다.모듈은 역 치수("인치당 스레드")인 직경 피치와 달리 직접적인 치수다.따라서 기어의 피치 지름이 40mm이고 톱니 수가 20개일 경우 모듈이 2개로 이는 각 톱니마다 피치 지름이 2mm 있음을 의미한다.[39]선호하는 표준 모듈 값은 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.8, 1.0, 1.25, 1.5, 2.0, 3.5, 3.5, 3, 4, 5, 6, 8, 10, 12, 16, 25, 32, 40, 50이다.[40]
제조하다
2014년 현재, 전 세계에서 생산된 기어 중 약 80%가 순 형태 몰딩에 의해 생산된다.금형 기어는 보통 분말 야금이나 플라스틱이다.[41]많은 기어는 금형(사출 성형 플라스틱 및 다이캐스트 금속 기어 포함)에서 빠져나올 때 수행되지만 분말 금속 기어는 소결 작업이 필요하고 모래 주조 또는 투자 주물은 이를 마무리하기 위해 기어 절단 또는 기타 가공 작업이 필요하다.가장 흔한 형태의 기어 커팅은 홉빙이지만 기어 쉐이핑, 밀링, 브로칭도 존재한다. 생산방식으로는 3D프린팅이 빠르게 확대되고 있다.자동차와 트럭의 변속기에 사용되는 금속 기어의 경우, 치아를 열처리하여 단단하고 내마모성을 높이는 동시에 코어를 부드럽고 단단하게 유지한다.뒤틀리기 쉬운 큰 기어의 경우 쐐기 프레스를 사용한다.
현대 물리학의 기어 모델
현대 물리학은 다른 방식으로 기어 모델을 채택했다.19세기에 제임스 서점 맥스웰은 자기장 선이 압축 불가능한 액체의 회전 튜브인 전자석의 모델을 개발했다.맥스웰은 기어 바퀴를 사용했고 이를 "공회전 바퀴"라고 하여 회전하는 자기장 라인의 것과 반대 방향으로의 입자의 회전으로서 전류를 설명하였다.[42]
더 최근에 양자물리학은 그들의 모델에 "퀀텀 기어"를 사용한다.기어 그룹은 인공적으로 구성된 나노기계 장치나 링 분자 그룹과 같은 몇 가지 다른 시스템의 모델 역할을 할 수 있다.[43]
3파 가설은 파동-입자 이중성을 베벨 기어와 비교한다.[44]
자연계의 기어 메커니즘

그 기어 메커니즘 이전에 독점적으로 인공,지만 이르면 1957년에, 기어 캠브리지 대학에서 planthoppers[45]과 과학자들의 다양한 종의 뒷다리에서 Alexandercoleoptratus의 Cambri에서 요정들의 고속 사진 촬영 기법을 함으로써 2013년에 이들의 기능적 중요성을 특징 짓는다 인정 받아 왔었다로 여겨졌다.dge대학.[46][47]이러한 기어는 모든 플랑토퍼의 님프 형태에서만 발견되며, 성인 단계까지 마지막 몰트 도중 분실된다.[48]I. coleoptractatus에서 각 다리는 400마이크로미터의 치아 스트립과 피치 반경 200마이크로미터로 되어 있으며, 각 치아의 기저부에 있는 필로트 곡선을 포함하여 10~12개의 완전 연동 스퍼형 기어 톱니가 있다.[49]관절은 기계식 기어처럼 회전하며, 30마이크로초 이내로 점프할 때 잇수스의 뒷다리를 동기화시켜 요 로테이션을 방지한다.[50][51][46]기어가 항상 연결되어 있는 것은 아니다.한 마리가 소년 곤충의 뒷다리에 각각 위치하며, 그것이 점프를 준비하면 두 세트의 이빨이 함께 잠긴다.그 결과, 다리는 거의 완벽한 일치로 움직여서 기어가 정지점까지 회전한 다음 잠금해제를 할 때 곤충에게 더 많은 힘을 준다.[50]
참고 항목
참조
- ^ https://www.bbc.co.uk/bitesize/guides/ztjpb82/revision/3
- ^ "Definition of GEAR". merriam-webster.com. Retrieved 20 September 2018.
- ^ "Transmission Basics". HowStuffWorks. 27 April 2005.
- ^ 데릭 J. 데 솔라 프라이스, 클록워크의 기원, 영구 운동 장치 및 나침반, 페이지 84
- ^ "The Antikythera Mechanism Research Project: Why is it so important?". Archived from the original on 4 May 2012. Retrieved 10 January 2011.
The Mechanism is thought to date from between 150 and 100 BC
- ^ 2004년 노턴 페이지 462
- ^ Lewis, M. J. T. (1993). "Gearing in the Ancient World". Endeavour. 17 (3): 110–115. doi:10.1016/0160-9327(93)90099-O.
- ^ "Segment gear". thefreedictionary.com. Retrieved 20 September 2018.
- ^ a b 도널드 힐(2012), 기발한 기계 장치에 대한 지식 책, 273페이지, 스프링거 사이언스 + 비즈니스 미디어
- ^ a b Irfan Habib, 중세 인도의 경제사, 1200-1500, 53페이지, Pearson Education
- ^ 조셉 니덤(1986)중국의 과학과 문명: 제4권, 제2권, 제298페이지.타이베이: 코브스 북스 주식회사
- ^ "Astrolabe By Muhammad Ibn Abi Bakr Al Isfahani".
- ^ "gear (n.)". Etymonline. Retrieved 13 February 2020.
- ^ "Etymology 1: Cog (noun)". Wiktionary. Retrieved 29 July 2019.
- ^ "cog (n.)". Etymonline. Retrieved 13 February 2020.
- ^ Grant, George B. (1893). A Treatise on Gear Wheels (6th, illus. ed.). Lexington, MA; Philadelphia, PA: George B. Grant. p. 21.
- ^ Radzevich, Stephen P. (2012). Dudley's Handbook of Practical Gear Design and Manufacture (PDF) (2nd ed.). Boca Raton, FL.: CRC Press, an imprint of Taylor & Francis Group. pp. 691, 702.
- ^ a b c d American Gear Manufacturers Association; American National Standards Institute, Gear Nomenclature, Definitions of Terms with Symbols (ANSI/AGMA 1012-G05 ed.), American Gear Manufacturers Association
- ^ "How Gears Work". howstuffworks.com. 16 November 2000. Retrieved 20 September 2018.
- ^ Machinery's Handbook. New York: Industrial Press. 2012. pp. 2125. ISBN 978-0-8311-2900-2.
- ^ Khurmi, R. S., Theory of Machines, S.CHAND
- ^ Schunck, Richard, "Minimizing gearbox noise inside and outside the box", Motion System Design.
- ^ Valance & Doutie 1964, 페이지 281
- ^ a b Helical gears, archived from the original on 26 June 2009, retrieved 15 June 2009.
- ^ 맥그로힐 2007, 742페이지.
- ^ Canfield, Stephen (1997), "Gear Types", Dynamics of Machinery, Tennessee Tech University, Department of Mechanical Engineering, ME 362 lecture notes, archived from the original on 29 August 2008.
- ^ Hilbert, David; Cohn-Vossen, Stephan (1952), Geometry and the Imagination (2nd ed.), New York: Chelsea, p. 287, ISBN 978-0-8284-1087-8.
- ^ a b 맥그로힐 2007, 743페이지.
- ^ Vallance & Doughtie 1964, 페이지 287.
- ^ Vallance & Doughtie 1964, 페이지 280, 296.
- ^ Vallance & Doughtie 1964, 페이지 290.
- ^ 맥그로힐 2007, 페이지 744
- ^ 크라브첸코 A.I. 보브다 A.M. 기어와 자석 커플.우크라이나의 Pat. N. 56700 – Bul. N. 2, 2011 – F16H 49/00.
- ^ ISO/DIS 21771:2007: "기어 – 원통형 비자발 기어 및 기어 쌍 – 개념 및 기하학", 국제 표준화 기구, (2007)
- ^ Gunnar Dahlvig (1982), "Construction elements and machine construction", Konstruktionselement och maskinbyggnad (in Swedish), 7, ISBN 978-9140115546
- ^ Hogan, C. Michael; Latshaw, Gary L. (21–23 May 1973). The Relationship Between Highway Planning and Urban Noise. Proceedings of the ASCE, Urban Transportation Division Specialty Conference. Chicago, Illinois: American Society of Civil Engineers, Urban Transportation Division.
- ^ Smith, Zan (2000), "Plastic gears are more reliable when engineers account for material properties and manufacturing processes during design.", Motion System Design.
- ^ a b "W. M. Berg Gear Reference Guide" (PDF). Archived from the original (PDF) on 21 April 2015.
- ^ Oberg, E.; Jones, F. D.; Horton, H. L.; Ryffell, H. H. (2000), Machinery's Handbook (26th ed.), Industrial Press, p. 2649, ISBN 978-0-8311-2666-7.
- ^ "Elements of metric gear technology" (PDF).
- ^ Fred Eberle (August 2014). "Materials Matter". Gear Solutions: 22.
- ^ Siegel, Daniel M. (1991). Innovation in Maxwell's Electromagnetic Theory: Molecular Vortices, Displacement Current, and Light. University of Chicago Press. ISBN 978-0521353656.
- ^ MacKinnon, Angus (2002). "Quantum Gears: A Simple Mechanical System in the Quantum Regime". Nanotechnology. 13 (5): 678–681. arXiv:cond-mat/0205647. Bibcode:2002Nanot..13..678M. doi:10.1088/0957-4484/13/5/328. S2CID 14994774.
- ^ Sanduk, M. I. (2007). "Does the Three Wave Hypothesis Imply Hidden Structure?" (PDF). Apeiron. 14 (2): 113–125. Bibcode:2007Apei...14..113S.
- ^ Sander, K. (1957), "Bau und Funktion des Sprungapparates von Pyrilla perpusilla WALKER (Homoptera - Fulgoridae)", Zool. Jb. Jena (Anat.) (in German), 75: 383–388
- ^ a b Burrows, Malcolm; Sutton, Gregory (13 September 2013). "Interacting Gears Synchronize Propulsive Leg Movements in a Jumping Insect". Science. 341 (6151): 1254–1256. Bibcode:2013Sci...341.1254B. doi:10.1126/science.1240284. hdl:1983/69cf1502-217a-4dca-a0d3-f8b247794e92. PMID 24031019. S2CID 24640726.
- ^ Herkewitz, William (12 September 2013), "The First Gear Discovered in Nature", Popular Mechanics
- ^ Lee, Jane J. (12 September 2013), "Insects Use Gears in Hind Legs to Jump", National Geographic
- ^ Stromberg, Joseph (12 September 2013), "This Insect Has The Only Mechanical Gears Ever Found in Nature", Smithsonian Magazine, retrieved 18 November 2020
- ^ a b Robertson, Adi (12 September 2013). "The first-ever naturally occurring gears are found on an insect's legs". The Verge. Retrieved 14 September 2013.
- ^ Functioning 'mechanical gears' seen in nature for the first time, PHYS.ORG, Cambridge University
참고 문헌 목록
- McGraw-Hill (2007), McGraw-Hill Encyclopedia of Science and Technology (10th ed.), McGraw-Hill Professional, ISBN 978-0-07-144143-8.
- Norton, Robert L. (2004), Design of Machinery (3rd ed.), McGraw-Hill Professional, ISBN 978-0-07-121496-4.
- Vallance, Alex; Doughtie, Venton Levy (1964), Design of machine members (4th ed.), McGraw-Hill.
- 산업신문(2012), 기계수첩(29차), ISBN 978-0-8311-2900-2
- Engineers Edge, Gear Design and Engineering Data.
추가 읽기
- American Gear Manufacturers Association; American National Standards Institute (2005), Gear Nomenclature: Definitions of Terms with Symbols (ANSI/AGMA 1012-F90 ed.), American Gear Manufacturers Association, ISBN 978-1-55589-846-5.
- Buckingham, Earle (1949), Analytical Mechanics of Gears, McGraw-Hill Book Co..
- Coy, John J.; Townsend, Dennis P.; Zaretsky, Erwin V. (1985), Gearing (PDF), NASA Scientific and Technical Information Branch, NASA-RP-1152; AVSCOM Technical Report 84-C-15.
- 크라브첸코 A.I. 보브다 A.M. 기어와 자석 커플.우크라이나의 Pat. N. 56700 – Bul. N. 2, 2011 – F16H 49/00.
- 스클레이터, 닐.(2011)."기어: 장치, 드라이브 및 메커니즘."메커니즘 및 기계 장치 소스북.제5판뉴욕: 맥그로 힐 페이지 131-174.ISBN 9780071704427.다양한 기어의 도면 및 설계.
- "Wheels That Can't Slip." 1945년 2월, 대중 과학, 페이지 120–125.
외부 링크
| 위키미디어 커먼즈에는 코그 휠과 관련된 미디어가 있다. |
- 기어륨. 기어 박물관 및 톱니바퀴 - 고풍스럽고 빈티지한 기어, 스프로켓, 래치 및 기타 기어 관련 물체.
- KMODDL(Kinematic Models for Design Digital Library) - 코넬 대학교에서 일하는 수백 명의 모델들의 영화와 사진
- 기어 톱니 형태에 대한 해석 형상의 적용에 대한 짧은 과거 설명
- 기어링에 대한 수리 자습서(로보틱스에 연결)
- 미국 기어 제조 협회
- 기어 테크놀로지, 기어 제조 저널