천체역학에서 신체의 특정한 상대적 각도운동량(흔히 →  은 그 신체의 각운동량을 질량으로 나눈 것이다.[1]궤도를 선회하는 두 개의 신체의 경우 그것은 상대 위치와 상대 속도의 벡터 산출물로, 문제의 신체의 질량으로 나눈다.
은 그 신체의 각운동량을 질량으로 나눈 것이다.[1]궤도를 선회하는 두 개의 신체의 경우 그것은 상대 위치와 상대 속도의 벡터 산출물로, 문제의 신체의 질량으로 나눈다.
이상적인 조건에서 주어진 궤도에 대해 일정하게 유지되기 때문에 특정한 상대적인 각운동량은 두 신체 문제의 분석에 중추적인 역할을 한다.이 맥락에서 "특정"은 단위 질량 당 각 운동량을 나타낸다.특정 상대 각도 운동량을 위한 SI 단위는 초당 제곱미터다.
정의
특정 상대 각도 운동량은 상대 위치 r→ 상대 속도 벡터 → 의 교차 생산물로 정의된다
속도 벡터 → 의 교차 생산물로 정의된다

여기서 → 는 벡터로서 , r→ m → m로 정의된다
, r→ m → m로 정의된다
→ 벡터는 순간적으로 혼란된 궤도와 일치하는 순간 오스카하는 궤도면에 항상 수직이다.시간이 지남에 따라 반드시 평균 궤도면에 수직이 되는 것은 아니다.
두 바디 케이스의 항상성 증명
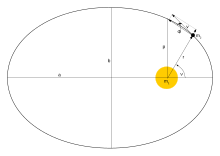
벡터 → 속도 벡터 → 참 이상 
 경로 각도 } 주위의 궤도에서
경로 각도 } 주위의 궤도에서
 타원의 가장 중요한 척도 또한 설명된다(이 중 참 이상 징후 은(는) 로 라벨이 지정됨).
타원의 가장 중요한 척도 또한 설명된다(이 중 참 이상 징후 은(는) 로 라벨이 지정됨).
특정 조건에서는 특정 각운동량이 일정하다는 것을 증명할 수 있다.이 증빙의 조건은 다음과 같다.
- 한 물체의 질량은 다른 물체의 질량보다 훨씬 크다.( 2

- 좌표계는 관성적이다.
- 각 물체는 수직으로 대칭되는 점 질량으로 취급될 수 있다.
- 두 몸을 연결하는 중력 외에 어떤 힘도 시스템에 작용하지 않는다.
증명
그 증거는 뉴턴의 만유인력의 법칙에서 파생된 두 가지 운동 방정식으로 시작한다.

여기서:
- → 은(는) 1}에서 }}까지의 위치 벡터로 스칼라 규모

- →은(가속) r→ 의 두 번째 파생상품이다
 .
. - 은
 (는) 중력 상수다.
(는) 중력 상수다.
위치 벡터와 동작 방정식의 교차 산물은 다음과 같다.

→ →= 두 번째 학기가 사라지기 때문에:
학기가 사라지기 때문에:

또한 다음과 같은 것을 도출할 수 있다.

이 두 방정식을 결합하면 다음과 같은 결과를 얻을 수 있다.

시간파생물이 0과 때문에 수량 → r→ r}\은 일정하다 .위치 변화율 대신 속도 벡터 → 특정 각도 운동량에는 → 사용:
.위치 변화율 대신 속도 벡터 → 특정 각도 운동량에는 → 사용:
- →= → → 은(는) 일정하다
 .
.
는 모멘텀의 인 구성인 r → p→ 와는 다른데 이는 문제의 물체의 질량을 포함하지 않기 때문이다.
이는 문제의 물체의 질량을 포함하지 않기 때문이다.
케플러의 행성 운동 법칙
케플러의 행성 운동 법칙은 위의 관계를 통해 거의 직접적으로 증명될 수 있다.
제1법칙
그 증거는 두 몸 문제의 방정식에서 다시 시작된다.이번에는 특정 상대 각도 운동량과 곱하기(크로스 제품)

왼쪽은 각운동량이 일정하기 때문에 d → h→) frac }}}{\ { t과 동일하다.
d → h→) frac }}}{\ { t과 동일하다.
몇 가지 단계를 거치면 우측은 다음과 같이 된다.

이 두 식을 동일하게 설정하고 시간이 지남에 따라 통합하면 ( C →로 이어진다

이제 이 방정식을 → 과(와) 곱하고 다시 배열함

마침내 궤도 방정식을[1] 얻는다.

즉, 반-라투스 p = p 및 편심 = efrac {이 있는 극좌표 원뿔 단면의 방정식이다
편심 = efrac {이 있는 극좌표 원뿔 단면의 방정식이다
제2법칙
두 번째 법칙은 세 방정식 중 두 번째 방정식에서 즉시 따라와 특정 상대 각도 운동량의 절대값을 계산한다.[1]
If one connects this form of the equation  with the relationship
with the relationship  for the area of a sector with an infinitesimal small angle 매우 작은 면 하나를 가진
for the area of a sector with an infinitesimal small angle 매우 작은 면 하나를 가진  방정식
방정식

제3법칙
케플러의 세번째는 제2법칙의 직접적인 결과다.1회전 이상 통합하면 궤도 주기가[1] 주어진다.

영역의 , 의 b 세미 미니어처 축을 = b로 교체하고
b 세미 미니어처 축을 = b로 교체하고 = h로 특정 상대 각도 모멘텀을 교체하면 된다
= h로 특정 상대 각도 모멘텀을 교체하면 된다 .
.

따라서 중심체의 상수로 줄일 수 있는 인공위성의 반주축과 궤도 주기 사이에는 관계가 있다.
참고 항목
참조
- ^ a b c d Vallado, David A. (2001). Fundamentals of astrodynamics and applications (2nd ed.). Dordrecht: Kluwer Academic Publishers. pp. 20–30. ISBN 0-7923-6903-3.



