보데 플롯
Bode plot

전기 공학 및 제어 이론에서, 보드 플롯 /ˈboʊdi/는 시스템의 주파수 반응을 나타내는 그래프입니다.일반적으로 주파수 반응의 크기(대개 데시벨)를 나타내는 Bode 크기 그림과 위상 이동을 나타내는 Bode 위상 그림의 조합입니다.
1930년대에 Hendrik Wade Bode가 원래 구상한 대로, 플롯은 직선 [1]세그먼트를 사용하여 주파수 반응의 점근적 근사치입니다.
개요
회로 이론과 제어 이론에 대한 그의 몇 가지 중요한 기여 중에서, 엔지니어 헨드릭 웨이드 보드는 1930년대 벨 연구소에서 일하는 동안 이득과 위상 이동 그림을 그리기 위한 간단하지만 정확한 방법을 고안했습니다.여기에는 그의 이름, 보데게인 그림 및 보데 위상 그림이 있습니다."보데"는 종종 /ˈboʊdi/BOH-dee로 발음되지만 네덜란드어 발음은 Bo-duh입니다. (네덜란드어: [ˈboːdə])[2][3]
Bode는 전화 네트워크에서 사용하기 위해 피드백이 있는 안정적인 증폭기를 설계하는 문제에 직면했습니다.그는 제조 중 또는 작동 [4]중에 발생하는 회로 특성의 변화에서 안정성을 유지하는 데 필요한 이득 여유와 위상 여유를 보여주기 위해 Bode 그림의 그래픽 설계 기법을 개발했습니다.개발된 원칙은 서보메커니즘 및 기타 피드백 제어 시스템의 설계 문제에 적용되었습니다.Bode 그림은 주파수 영역의 분석 예제입니다.
정의.
전송 H {\ Hs)}( {\ H)}(라플라스 영역의 복합 주파수인 s{\를 갖는 선형 시간 불변 시스템에 대한 Bode 그림은 크기 그림과 위상 그림으로 구성됩니다.


Bode 매그니튜드 플롯은 {\}의 함수 H( j ) 입니다j{\ j는 가상 단위입니다).크기 그림의 축은 로그이고 크기는 데시벨로 표시됩니다. 즉, H H 은 에 표시됩니다





보데 위상 플롯은 으로 \displaystyle 의 위상을 \의 함수로서 도로 표현한 그래프입니다. 위상은 크기 플롯과 동일한 로그 {\ 축에 플롯됩니다.그러나 위상 값은 선형 수직 축에 표시됩니다.
 위상을
위상을 주파수 응답
이 섹션에서는 보데 플롯이 시스템의 주파수 응답을 시각화한 것임을 보여줍니다.
전송 H를 갖는 선형 시간 불변 시스템을 생각해 보십시오. 시스템이 주파수가{\인 사인파 입력을 받는다고 가정합니다.

이는 지속적으로 적용됩니다. 즉 - {\부터 {\ t 까지.응답 형식은 다음과 같습니다.
 {\
{\

즉, 이 사인파 신호({displaystyle 도 위상({에 의해 입력에 대해 위상이 이동했습니다.
 위상
위상
반응의 크기는 다음과 같습니다[5].
-
(1)

그리고 위상 변화는
-
(2)

이러한 방정식의 증명을 위한 스케치가 부록에 나와 있습니다.
요약하면, 주파수가({\omega}인 에 따라 시스템은 H) {\mathrm \ 인자에 의해 증폭되고 µ(ω displaystyle \arg \에 의해 위상 이동되는 출력으로 동일한 주파수로 응답합니다.따라서 이러한 양은 주파수 반응의 특성을 나타내며 Bode 그림에 표시됩니다.


핸드메이드 보드 플롯 규칙
많은 실제 문제의 경우 정밀 반응의 점근인 직선 세그먼트를 사용하여 상세 보데 그림을 근사화할 수 있습니다.다중 요소 전달 함수의 각 항에 대한 효과는 Bode 그림에 대한 일련의 직선으로 근사할 수 있습니다.이를 통해 전체 주파수 응답 기능을 그래픽으로 해결할 수 있습니다.디지털 컴퓨터가 널리 보급되기 전에는 지루한 계산의 필요성을 줄이기 위해 그래픽 방법이 광범위하게 사용되었습니다. 그래픽 솔루션을 사용하여 새로운 설계를 위한 실현 가능한 매개 변수 범위를 식별할 수 있었습니다.
Bode 그림의 전제는 함수의 로그를 다음과 같은 형태로 고려할 수 있다는 것입니다.

0과 극의 로그 합계:

이 아이디어는 위상 다이어그램을 그리는 방법에 명시적으로 사용됩니다.진폭 그림을 그리는 방법은 이 아이디어를 암시적으로 사용하지만 각 극 또는 0의 진폭 로그는 항상 0에서 시작하고 하나의 점근 변화(직선)만 있기 때문에 방법을 단순화할 수 있습니다.
직선 진폭 그림
진폭 데시벨은 일반적으로 10µX)를사용하여 데시벨을 정의합니다.양식에 전송 함수가 주어집니다.


서 n})과({y_})은 상수이고, {{ s=\ \ > { H는 전달 함수입니다.




 전달 함수입니다.
전달 함수입니다.- = x = 0)인 s의 모든 값에서 선의 기울기를 20 시키고 B 를) 10년마다 증가시킵니다.
- \omega =극)인 s의 모든 값에서 선의 기울기를 마다 , 씩 줄입니다
- 그래프의 초기 값은 경계에 따라 달라집니다.초기 점은 초기 각주파수({를 함수에 넣고 H H \를 찾는 것으로 찾을 수 있습니다.
- 초기 값에서 함수의 초기 기울기는 초기 값보다 낮은 값에 있는 0과 극의 수와 순서에 따라 달라지며 처음 두 규칙을 사용하여 발견됩니다.

 ) 10년마다
) 10년마다 

환원 불가능한 2차 다항식을 처리하기 위해, 2 + + {\2} + +c는 많은 경우에 ( + ) {\+ {\와근사할 수 있습니다.
 많은 경우에 (
많은 경우에 (
0과 극은{{이( 특정 x n {{ {{과(와) 같을 때 발생합니다.이는 문제의 함수가 H의 이기 때문이며 함수이므로 \ displaystyle H \ = {\ H이기 때문입니다.따라서(+ n) \\ + _ {n 항과 관련된 0 또는 극이 있는 모든 위치에서, 해당 항의 는 + j ) n 2 + 2 \ {(_ { + \ \ }} \x { - \ {j}} ) = {2}} {mega }} {입니다




보정된 진폭 플롯
직선 진폭 그림을 수정하는 방법
- 0이 때마다 점 3 3를 선 위에 놓습니다.
- 모든 극에서 점 밴드 3를 선 아래에 놓습니다.
- 직선을 점근선(원곡선이 접근하는 선)으로 사용하여 해당 점을 통해 부드러운 곡선을 그립니다.
 선 위에 놓습니다.
선 위에 놓습니다. 선 아래에 놓습니다.
선 아래에 놓습니다.이 수정 방법은 n {{ {{의 복잡한 값을 처리하는 방법을 포함하지 않습니다. 환원 불가능한 다항식의 경우,그래프를 수정하는 가장 좋은 방법은 극 또는 0에서 환원 불가능한 다항식에 해당하는 전달 함수의 크기를 실제로 계산하고 해당 극 또는 0에서 선 위 또는 아래에 점을 배치하는 것입니다.
직선 위상도
위와 동일한 형태의 전달 함수가 주어지면,
아이디어는 각 극과 0에 대해 별도의 플롯을 그린 다음 이들을 합산하는 것입니다.실제 위상 곡선은 ([ (s) ] [ ( )] ) \ [ 주어집니다
![-\arctan \left({\tfrac {{\mathrm {Im}}[H(s)]}{{\mathrm {Re}}[H(s)]}}\right)](https://wikimedia.org/api/rest_v1/media/math/render/svg/67541821bb17adfa48f97d0c120d30b71d9199a8)
각 극과 0에 대해 위상도를 그리는 방법
- A A가 의 값이면 0 에서 (경사가 0인) 선을 시작합니다({ 0
- A A가 음수인 에서(경사가 0인) 시작 선을 시작합니다({\
- 불안정한 0과 극의 합이 홀수일 경우, 그 기준에 180°를 더합니다.
- 매 n \ \= 안정적인0 - < 0\ name { < )에서 기울기를 45 증가시키고 = \ \EG)보다 10년 전부터 시작합니다. 10{\ 스타일
- 매 {\ = (안정 극의경우 - <{\에서 = {\ = :
- 불안정한"(오른쪽 반평면) 극과 0(> 은 반대 동작을 합니다.
- 위상이 0°({ 제로의 경우) 90의 경우으로 바뀌면 경사를 다시 평평하게 합니다.
- 각 극 또는 0에 대해 하나의 선을 표시한 후 선을 함께 추가하여 최종 위상도를 구합니다. 즉, 최종 위상도는 이전 각 위상도의 중첩입니다.



 }(
}(







예
1차(1극) 로우패스 필터에 대한 직선 플롯을 생성하려면 각 주파수의 관점에서 전송 함수를 고려합니다.

위의 방정식은 전달 함수의 정규화된 형태입니다.Bode 플롯은 위의 그림 1(b)에 나와 있으며, 직선 근사의 구성에 대해서는 다음에 설명합니다.
크기 그림
데시벨 게인 B에 의해 주어진 위의 전달 함수의 크기(데시벨 단위)(정규화되어 각 주파수 형태로 변환됨):


그런 다음 로그 스케일에서 표시된 주파수 \omega는 두 줄로 근사할 수 있으며 전송 함수의 점근적(대략) 크기 Bode 플롯을 형성합니다.
- 낮은 주파수에서 항은 작고 무시될 수 있기 때문에 0dB의 수평 라인입니다. 위의 데시벨 이득 방정식은 0과 같습니다.
- 높은 주파수에서 {\displaystyle 항이 지배하고 위의 데시벨 게인 표현식이 logω로단순화되므로, {\displaystyle \ 위의 각 주파수에 대한 두 번째 라인은 10년마다 -20 dB의 기울기를 갖는 라인입니다. { 이는 10년마다 가인직선입니다.




이 두 선은 코너 주파수에서 만나요.그래프에서 코너 주파수보다 훨씬 낮은 주파수의 경우 회로의 감쇠가 0dB로 유니티 패스 대역 이득에 해당합니다. 즉, 필터 출력의 진폭이 입력의 진폭과 같습니다.코너 주파수를 초과하는 주파수는 감쇠됩니다. 주파수가 높을수록 감쇠도 높아집니다.
위상도
위상 Bode 플롯은 다음과 같이 주어진 전달 함수의 위상각을 플롯함으로써 얻을 수 있습니다.

대 \여기서 \ 및 \는 각각 입력 및 절단 각 주파수입니다.코너보다 훨씬 낮은 입력 주파수의 경우 비율 c{c이(가) 작으므로 위상각이 0에 가깝습니다.이 증가하면 위상의 절대값이 증가하고 θ \= \일 때 -45도가 됩니다. 입력 주파수가 코너 주파수보다 훨씬 클 경우 비율이 증가하면 위상각은 점근적으로 -90도에 근접합니다.위상도의 주파수 척도는 로그입니다.

정규화된 그림
크기 및 위상도 모두에서 수평 주파수 축은 정규화된 (비차원) 주파수 비율 c으)로 대체할 수 있습니다.이러한 경우 모든 입력 주파수가 차단 주파수 c의 배수로 표현되므로 플롯이 정규화되고 주파수 단위는 더 이상 사용되지 않습니다.
0과 폴이 있는 예제
그림 2-5는 Bode 그림의 구성을 추가로 보여줍니다.극과 0이 모두 있는 이 예제에서는 중첩을 사용하는 방법을 보여 줍니다.먼저 구성 요소가 별도로 제시됩니다.
그림 2는 0 및 저역 통과 극에 대한 Bode 크기 그림을 보여주며, 두 그림을 Bode 직선 그림과 비교합니다.직선 그림은 극(0) 위치까지 수평을 이룬 다음 20dB/decade에서 하강(상승)합니다.두 번째 그림 3은 위상에 대해서도 동일합니다.위상도는 극(영) 위치보다 10배 낮은 주파수 인자까지 수평을 유지한 다음 극(영) 위치보다 10배 높은 주파수가 될 때까지 45°/10년에서 하강(상승)합니다.그런 다음 그림은 90°의 최종 전체 위상 변화에서 더 높은 주파수에서 다시 수평이 됩니다.
그림 4와 그림 5는 극과 영점도의 중첩(단순 덧셈)이 수행되는 방식을 보여줍니다.Bode 직선 그림을 다시 정확한 그림과 비교합니다.더 흥미로운 예를 만들기 위해 0은 극보다 높은 주파수로 이동되었습니다.그림 4에서 극의 20dB/10년 강하는 0의 20dB/10년 상승에 의해 억제되어 0 위치 이상의 주파수에 대한 수평 크기 그림이 생성됩니다.그림 5의 위상도에서 극과 0이 위상에 모두 영향을 미치는 영역에서 직선 근사치가 상당히 근사하다는 것을 알 수 있습니다.그림 5에서도 직선 그림에서 위상이 변화하는 주파수 범위는 극(0) 위치 위와 아래의 10배의 주파수로 제한됩니다.극과 0의 위상이 모두 존재하는 경우, 두 위상 모두 활성 기여자인 제한된 주파수 범위에서 극의 45°/10년 강하가 0의 45°/10년 상승에 의해 억제되기 때문에 직선 위상 플롯은 수평입니다.
- 폴과 0이 있는 예제
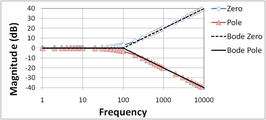
그림 2: 제로 패스 및 로우 패스 극에 대한 보데 크기 그림. "보데"로 표시된 곡선은 직선 보데 그림입니다.

그림 3: 제로 및 로우패스 극에 대한 보데 위상도. "보데"라는 레이블이 지정된 곡선은 직선 보데 그림입니다.

그림 4: 극-영점 조합에 대한 Bode 크기 그림; 0의 위치는 그림 2와 3에서보다 10배 더 높습니다; "Bode"로 표시된 곡선은 직선 Bode 그림입니다.
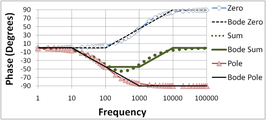
그림 5: 극-영점 조합에 대한 Bode 위상도; 0의 위치는 그림 2와 3에서보다 10배 더 높습니다; "Bode"로 표시된 곡선은 직선 Bode 그림입니다.




이익률 및 단계 이익률
보데도는 증폭기의 게인 및 위상 여유를 찾아 음의 피드백 증폭기의 안정성을 평가하는 데 사용됩니다.이득과 위상 여유의 개념은 다음과 같이 주어진 음의 피드백 증폭기에 대한 이득 표현에 기초합니다.

여기서FB A는 피드백이 있는 증폭기 이득(폐쇄 루프 이득), β는OL 피드백 계수, A는 피드백이 없는 이득(개방 루프 이득)입니다.이득OL A는 크기와 [note 1]위상 모두를 갖는 주파수의 복잡한 함수입니다.이 관계를 조사한 결과, 곱 βAOL = -1일 경우 무한 이득(불안정성으로 간주됨)이 발생할 가능성이 있습니다. (즉, βA의OL 크기는 단일성이고 위상은 -180°, 이른바 바르하우젠 안정성 기준).보데도는 증폭기가 이 조건을 충족하는 데 얼마나 근접했는지를 결정하는 데 사용됩니다.
이 결정의 핵심은 두 개의 주파수입니다.여기서 f로180 표시되는 첫 번째는 개방 루프 게인이 플립 부호를 나타내는 주파수입니다.여기서0 dB f로 표시된 두 번째는 제품의 크기가 βOL A = 1인 주파수입니다(dB 단위, 크기 1은 0dB).즉, 주파수180 f는 다음 조건에 의해 결정됩니다.

여기서 수직 막대는 복소수의 크기를 나타냅니다(:a + [ + ] a + j} b = ^{+ b^{}). 빈도 f는0 dB 다음 조건에 의해 결정됩니다.
![|a+{\mathrm {j}}b|=\left[a^{2}+b^{2}\right]^{{{\frac 12}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8f9fca916ec587a099995e0427966806c8b4d2e2)

불안정성에 근접하는 한 가지 척도는 이득 마진입니다.Bode 위상도는 βA의OL 위상이 -180°에 도달하는 주파수를 찾습니다(여기서180 주파수 f로 표시).이 빈도를 사용하여 Bode 크기 그림은 βA의OL 크기를 찾습니다.βAOL ≤ 1이면 언급한 것처럼 증폭기가 불안정합니다.βAOL < 1이면 불안정성이 발생하지 않으며, βAOL = 1에서 βA의OL 크기에 대한 dB 단위의 분리를 이득 마진이라고 합니다.매그니튜드 1이 0dB이므로 이득 여유는 단순히 동등한 형식 중 하나입니다. 10µ A 180 = 로그 ) - 로그 ( - 1 \ 20 _displaystyle 20 { _{} ^- \ A_1)입니다.

불안정성에 대한 근접성의 또 다른 동등한 척도는 위상 여유입니다.Bode 매그니튜드OL 그림은 βA의 매그니튜드가 일치하는 주파수를 찾습니다(여기서 주파수0 dB f로 표시).이 주파수를 사용하여 Bode 위상도는 βA의OL 위상을 찾습니다.만약 βAOL0 dB(f) > -180°의 위상이라면, 불안정성 조건은 어떤 주파수에서도 충족될 수 없으며(f = f일180 때 크기가 1 미만이 되기 때문에), -180°보다 높은 f도에서의 위상0 dB 거리를 위상 여유라고 합니다.
안정성 문제에 대한 간단한 예 또는 아니오만 필요한 경우, f < f인180 경우0 dB 앰프는 안정적입니다.이 기준은 극 및 영점 위치(최소 위상 시스템)에 대한 일부 제한을 충족하는 증폭기에 대해서만 안정성을 예측하기에 충분합니다.일반적으로 이러한 제한이 충족되더라도 나이키스트 [6][7]그림과 같은 다른 방법을 사용해야 합니다.최적 이득 및 위상 여유는 네반린나-픽 보간 [8]이론을 사용하여 계산할 수 있습니다.
Bode 그림 사용 예제
그림 6과 7은 이득 동작과 용어를 보여줍니다.3극 증폭기의 경우, 그림 6은 피드백이 없는 이득(개방 루프 이득) A와 피드백이FB 있는 이득(폐쇄 루프 이득)에OL 대한 Bode 플롯을 비교합니다.자세한 내용은 음의 피드백 증폭기를 참조하십시오.
이 예제에서는OL 저주파에서 A = 100dB, 그리고 1 / β = 58dB입니다.저주파에서는 A ≈ 58 dB도 마찬가지입니다FB.
제품OL βOL A가 아니라 개방 루프 이득OL A가 표시되기 때문에 조건 A = 1 / β가 f를0 dB 결정합니다.저주파 및 큰OL A의 경우 피드백 이득은FB A ≈ 1 / β이므로(큰OL 이득 A의 경우 본 섹션의 시작 부분에 있는 피드백 이득에 대한 공식 참조) f를0 dB 찾는 동등한 방법은 피드백 이득이 개방 루프 이득과 교차하는 위치를 살펴보는 것입니다. (위상 마진을 찾기 위해서는0 dB 주파수 f가 나중에 필요합니다.
f에서의0 dB 두 이득의 이 교차점 근처에서, 바크하우젠 기준은 이 예에서 거의 충족되며, 피드백 증폭기는 엄청난 이득의 피크를 나타냅니다OL(β A = -1이면 무한대일 것입니다).유니티 게인0 dB 주파수 f를 넘어 개방 루프 게인은 A ≈ A에OL 이를 정도로FB 충분히 작습니다(작은OL A의 경우 이 섹션의 시작 부분에 있는 공식을 검토하십시오).
그림 7은 해당 위상 비교를 보여줍니다. 피드백 증폭기의 위상은 개방 루프 게인이 -180°의180 위상을 갖는 주파수 f까지 거의 0에 가깝습니다.이 근처에서는 피드백 증폭기의 위상이 갑자기 아래로 떨어져 개방 루프 증폭기의 위상과 거의 동일해집니다. (작은 A의OL 경우FB A ≈ AOL)
그림 6과 그림 7의 레이블이 지정된 지점을 비교하면, 이 증폭기에서180 유니티 게인0 dB 주파수 f와 위상-플립180 주파수 f가 f ≈ f0 dB ≈ 3.332 kHz로 거의 동일하다는 것을 알 수 있으며, 이는 게인 마진과 위상 마진이 거의 0임을 의미합니다.앰프는 경계선이 안정적입니다.
그림 8과 9는 서로 다른 양의 피드백 베타에 대한 이득 마진과 위상 마진을 보여줍니다.피드백 계수는 그림 6 또는 7보다 작게 선택되어 조건 βOL A = 1을 낮은 주파수로 이동합니다.이 예에서는 1 / β = 77 dB이며 저주파에서는FB A ≈ 77 dB입니다.
그림 8은 이득 그림을 보여줍니다.그림 8에서, 1 / β와OL A의 교차는 f = 1 kHz에서 발생합니다0 dB.f 근처의0 dB 이득FB A의 피크는 거의 [note 2][9]사라졌습니다.
그림 9는 위상도입니다.그림 8의 크기 그림에서 위에서 확인한 f = 1kHz 값을0 dB 사용하여 f에서 개방0 dB 루프 위상은 -180° 위에서 45°의 위상 여유인 -135°입니다.
그림 9를 사용하여 -180°의 위상에 대해 f = 3.332kHz의 값을180 사용합니다(물론[note 3] 앞서 살펴본 결과와 동일함).f에서 그림180 8의 개방 루프 이득은 58 dB이고, 1 / β = 77 dB이므로 이득 여유는 19 dB입니다.
안정성은 증폭기 응답의 유일한 기준이 아니며, 많은 응용 분야에서 안정성보다 더 엄격한 요구는 양호한 단계 응답입니다.경험에 비추어 볼 때, 좋은 단계의 반응에는 적어도 45°의 위상 여유가 필요하며, 특히 제조 공차로 인한 구성 요소 변동이 [9]문제가 되는 경우에는 70° 이상의 여유가 권장됩니다.단계 응답 문서에서 위상 여유에 대한 설명도 참조하십시오.
- 예

그림 6: 피드백 증폭기FB A(dB) 및 해당 개방 루프 증폭기OL A의 이득.매개변수 1/β = 58dB, 저주파에서는FB A ≤ 58dB.βAOL = 1은 거의 f = f에서180° 발생하기 때문에 이 증폭기의 이득 마진은 거의 0입니다.

그림 7: 도 단위의 피드백 증폭기FB °A와 해당하는 개방 루프 증폭기OL °A의 위상.위상 편이는 거의 단일 이득 주파수 f = f0 dB = βOL A ▁1 1에서 발생하기 때문에 이 증폭기의 위상 여유는 거의 0입니다.
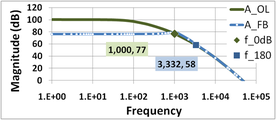
그림 8: 피드백 증폭기FB A(dB) 및 해당 개방 루프 증폭기OL A의 이득.이 예제에서는 1 / β = 77dB입니다.이 앰프의 게인 마진은 19dB입니다.
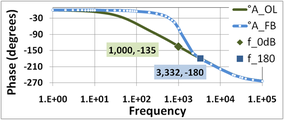
그림 9: 도 단위의 피드백 증폭기FB A와 해당하는 개방 루프 증폭기OL A의 위상.이 증폭기의 위상 여유는 45°입니다.




보데플로터

보드 플로터는 오실로스코프와 유사한 전자 기기로, 피드백 제어 시스템 또는 필터에서 주파수에 대해 표시된 회로의 전압 게인 또는 위상 편이에 대한 보드 다이어그램 또는 그래프를 생성합니다.이에 대한 예는 그림 10에 나와 있습니다.코너(차단) 주파수와 게인 및 위상 여유도 측정을 통해 필터를 분석 및 테스트하고 피드백 제어 시스템의 안정성을 테스트하는 데 매우 유용합니다.
이는 벡터 네트워크 분석기에서 수행하는 기능과 동일하지만 네트워크 분석기는 일반적으로 훨씬 높은 주파수에서 사용됩니다.
교육/연구 목적으로, 주어진 전송 함수에 대한 Bode 다이어그램을 플로팅하면 더 잘 이해하고 더 빠른 결과를 얻을 수 있습니다(외부 링크 참조).
관련 그림
서로 다른 좌표계에서 동일한 데이터를 표시하는 두 개의 관련 그림은 나이키스트 그림과 니콜스 그림입니다.이러한 그래프는 입력이 주파수이고 출력이 주파수 반응의 크기와 위상이 출력인 모수 그림입니다.나이키스트 그림은 이러한 값을 반지름 및 위상 대 인수(각도)에 대한 크기 매핑과 함께 극좌표로 표시합니다.니콜스 그림은 로그 척도에 사각형 좌표로 표시됩니다.


참고 항목
메모들
- ^ 일반적으로 주파수가 증가함에 따라 게인 강하의 크기가 증가하고 위상이 더 음수가 됩니다. 이는 추세일 뿐이며 특정 주파수 범위에서 반전될 수 있습니다.비정상적인 이득 동작은 이득 및 위상 여유의 개념을 적용할 수 없게 만들 수 있습니다.그런 다음 안정성을 평가하기 위해 나이키스트 그림과 같은 다른 방법을 사용해야 합니다.
- ^ 이득의 정점이 완전히 사라지는 피드백의 임계량은 최대 플랫 또는 버터워스 설계입니다.
- ^ 개방 루프 게인이 부호180 f를 플립하는 빈도는 피드백 계수의 변화에 따라 변하지 않습니다. 개방 루프 게인의 특성입니다.f에서의180 이득 값도 β의 변화에 따라 변하지 않습니다.따라서 그림 6과 7의 이전 값을 사용할 수 있습니다.그러나 명확한 설명을 위해 그림 8과 9만 사용하여 절차를 설명합니다.
레퍼런스
- ^ R. K. Rao Yarlagadda (2010). Analog and Digital Signals and Systems. Springer Science & Business Media. p. 243. ISBN 978-1-4419-0034-0.
- ^ 반 발켄버그, 일리노이 대학교 어바나-샴페인, "기억에 남습니다:Hendrik W. Bode (1905-1982), 자동 제어에 관한 IEEE 거래, Vol.AC-29, No. 3, 1984년 3월, 193-194페이지인용: "그의 이름에 대해 뭔가 말해야 합니다.벨 연구소의 그의 동료들과 그 이후 세대의 엔지니어들에게, 그 발음은 boh-deee입니다.보드 가족은 원래 네덜란드어를 보흐다로 사용하는 것을 선호했습니다."
- ^ "Vertaling van postbode, NL>EN". mijnwoordenboek.nl. Retrieved 2013-10-07.
- ^ 데이비드 A.인간과 기계 사이의 민델: Cybernetics JHU Press 이전의 피드백, 제어 및 컴퓨팅, 2004 ISBN 0801880572, 페이지 127-131.
- ^ Skogestad, Sigurd; Postlewaite, Ian (2005). Multivariable Feedback Control. Chichester, West Sussex, England: John Wiley & Sons, Ltd. ISBN 0-470-01167-X.
- ^ Thomas H. Lee (2004). The design of CMOS radio-frequency integrated circuits (Second ed.). Cambridge UK: Cambridge University Press. p. §14.6 pp. 451–453. ISBN 0-521-83539-9.
- ^ William S Levine (1996). The control handbook: the electrical engineering handbook series (Second ed.). Boca Raton FL: CRC Press/IEEE Press. p. §10.1 p. 163. ISBN 0-8493-8570-9.
- ^ Allen Tannenbaum (February 1981). Invariance and Systems Theory: Algebraic and Geometric Aspects. New York, NY: Springer-Verlag. ISBN 9783540105657.
- ^ a b Willy M C Sansen (2006). Analog design essentials. Dordrecht, The Netherlands: Springer. pp. 157–163. ISBN 0-387-25746-2.
외부 링크
- 점근 보데도를 조각별로 그리는 방법
- 보드 플롯 생성을 위한 그누플롯 코드: DIN-A4 인쇄 템플릿(pdf)


